
Read before use
Safety
Always wear protective gear and a helmet when riding an electric skateboard, prioritizing safety.
CAN Communication
When connecting multiple VESC controllers via CANBUS, always make sure to connect their battery wires in parallel before powering them on.
If you power the controllers one at a time, the voltage difference during startup can flow through the CAN lines and damage the CAN chip.
If you must power them on separately, disconnect the CAN wires first and reconnect them only after both controllers are powered.
Configuration
In most cases, you can complete over 90% of the configuration using the VESC's wizard page.
Wiring
Please always follow the sticker or laser silk screen markings on the ESCs for wiring.
Damage
Accidentally introducing high voltage from the battery into the signal port of the controller can cause damage, which is one of the most common after-sales issues. It can result in MCU breakdown and a short circuit in the 3.3V line. Therefore, ensure that all connections are secure before powering on, and provide insulation protection for exposed high-voltage connectors.
Phase Filters
Some ESCs available for purchase do not support phase filters. If your purchased controller does not support phase filters, you need to disable the phase filters before configuring FOC. However, our provided custom firmware already has the phase filters disabled by default, so you don't need to manually disable them.
Fuses
It is recommended to add fuses between the battery and the controller to effectively protect your controller or BMS in case of accidents. Do not overly rely on the BMS because its protection may fail in some extreme situations.
CUT OFF
If your controller experiences CUT OFF during acceleration, it is usually caused by the following reasons:
- Insufficient battery discharge capacity, inadequate BMS current, or significant voltage difference among batteries. This manifests as power interruption during acceleration, followed by immediate power restoration and controller reboot. In this case, check if the battery supply meets the system requirements.
- Error code ABS_OVER_CURRENT. This can be related to various factors. Increasing the value of Absolute Maximum Current or enabling the slow ABS current limit switch may improve the situation, but it is not a fundamental solution. In this case, you need to check the compatibility between your motor and controller, ensure proper FOC configuration, or reduce current usage.
- Loose motor wire connections, undersized specifications, or oxidation causing excessive contact resistance can affect the normal operation of the motor and lead to power interruptions during acceleration.
- Signal wire detachment. Strong vibrations during riding can cause terminal connectors to come loose, so it is crucial to secure the wires using glue or other methods.
- Remote control signal loss. Contact the remote control manufacturer.
Waterproofing and Dustproofing
Most of our controllers are sprayed with waterproof coating in critical areas before shipment. However, this level of protection is still insufficient. Please ensure proper waterproofing and dustproofing for all electronic components on your device.
Switch Button
Please refer to "here" for configuration.
Firmware
Some ESCs require the use of dedicated custom firmware to function properly. Using the wrong firmware may result in damage to the ESC. We pre-install compatible firmware before shipping.
Methods for updating firmware: 1. Upload firmware through VESC TOOL. 2. Burn firmware using STLINK. 3. Upload firmware through DFU mode. Here, I will only provide the method for updating firmware through VESC TOOL. Please refer to "here" for more information.
UART devices interference
UART devices, such as UART receivers, Bluetooth modules, Davega, etc., when plugged into the ESC, may interfere with the normal reading or writing of ESC parameters. This could lead to error pop-ups in VESCTOOL, as well as abnormal FOC parameter readings. Incorrect configurations may potentially damage your ESC and motor. It is crucial to check the results after completing the FOC wizard each time. If you encounter issues with writing or abnormal readings, you can disconnect all UART devices or set the APP to "No APP" in the APP page, and then proceed with another round of FOC wizard.
Restore Default Configuration
When configuring the motor FOC wizard, there will be a pop-up prompt asking whether to restore default parameters. It is recommended to choose 'YES' every time to avoid various issues caused by incorrect settings

You can also try to fix any abnormal situations by restoring the default configuration.Like setting the same CAN ID causing communication failure on the other side.....
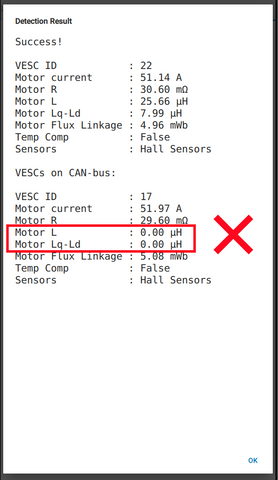
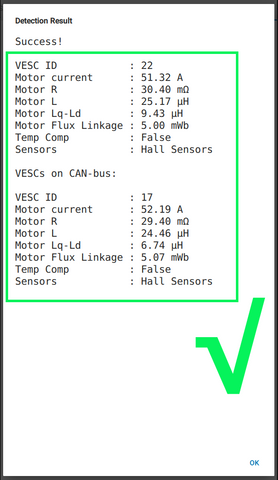
Incorrect FOC detection result
Every time the motor FOC configuration is completed, it is necessary to check whether the result is available. Forcing the motor to run with an incorrect result may blow up the electronic speed controller! If you encounter a result like this, please restore the parameters to default and then perform the FOC configuration again.
to be continue...